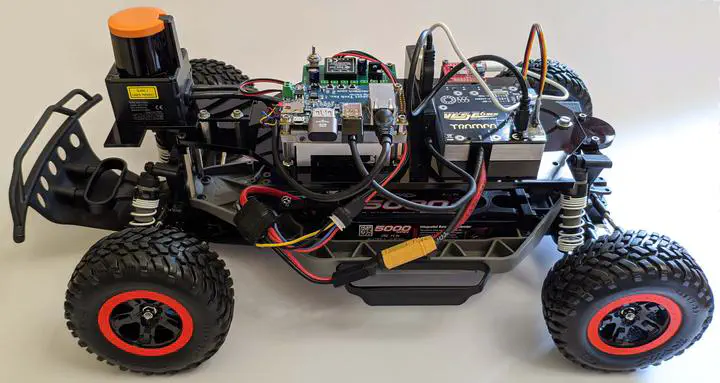
 F1tenth autonomous car
F1tenth autonomous carLIDAR data are used as input of a Deep Q-Network on a realistic 1/10 scale car prototype controlled by ROS. The robot-driver learns how to run in race tracks by exploiting the experience gained through a mechanism of rewards that allow the agent to learn without human supervision
The project evolved through three experiments:
- NN comparison: the performance of several NNs are compared to find the best one for LIDAR data
- Simulation to real. Two approaches:
- The agent is trained directly in the real world thanks to the embedded GPU of the car. This solve the problem of transferring skills acquired in simulation to the real robotic system. [video]
- Transfer learning from the simulation to the real car, thanks to a robust pre-processing of the data and the realism of the simulator. [video]
- F1 racetracks: The agent task is to complete laps as quickly as possible in complex F1 racetracks. The agent has been trained only on one track and it reached top results on all tested racetracks, demonstrating how DQN can generalize very well on unseen hard tracks. [video]

